Currently Empty: ₹0.00


Blogs
How to calculate degree of freedom?
Simply put, the degree of freedom is the smallest amount of motions that an item can make in a three-dimensional space.
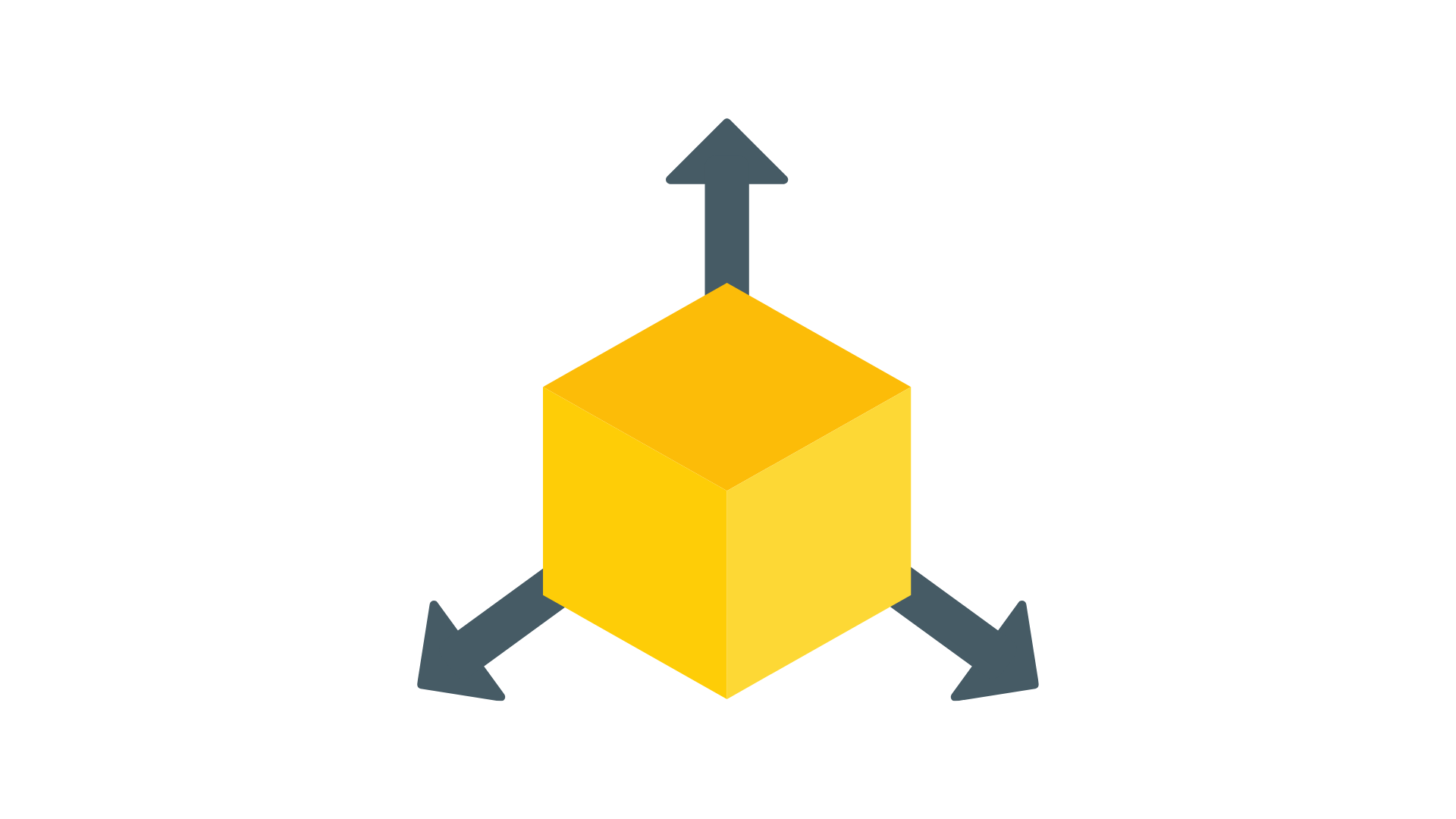
Take this rectangular box as an example. It has the ability to move linearly in all three axes (x, y, and z) as well as rotate in all three axes.

As a result, in 3D space, the DOF of this rectangular box (or rigid body) is 6.
We can work out some real-time examples without any more technical explanation. We can figure out how many degrees of freedom our wrist has (take right or left).

Before we can do that, we must first determine the type of joint that exists. There are typically two types of joints available. Rotary and Linear
A linear joint, also known as a prismatic junction, allows two links to move in a straight line.
A rotary joint is a device that allows two links to rotate.
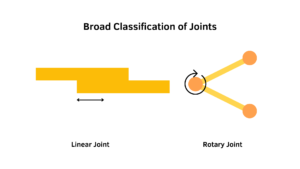
These are the two most common types of joints; we can classify them further, but for the purposes of calculating the degree of freedom, this is sufficient.

Then we need to figure out how many different motions each joint can perform.

Finally, to compute the DOF, we must combine all of the motions together.
Let’s put this to the test for our wrist.
There is no potential of linear movement because our wrist is a rotational joint. As a result, there are 1 joint. All three axes of rotation are possible with this joint. As a result, each joint has only one motion.
The DOF of your wrist is calculated by adding all the motions together (1 + 1 + 1 = 3). It’s that easy.

Calculating DOF in this manner is the easiest method. Grübler’s Formula can be used to calculate DOF for complex mechanisms.